Netweaver
1024程序员节
缩位求和
磁盘已满
CANoe
自动生成
nosql
集群模式
cmake_policy
模型蒸馏
测试工程师
无人机
激活函数
文件
redis安装
下载视频方法
时间尺度
QSS
清华大学
软件工程师
点云配准
2024/4/13 5:40:44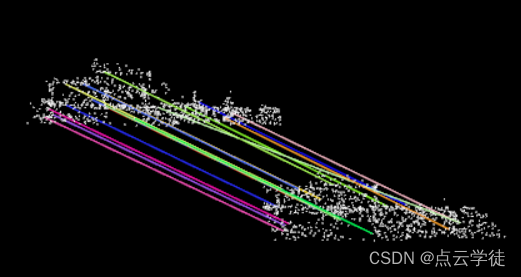
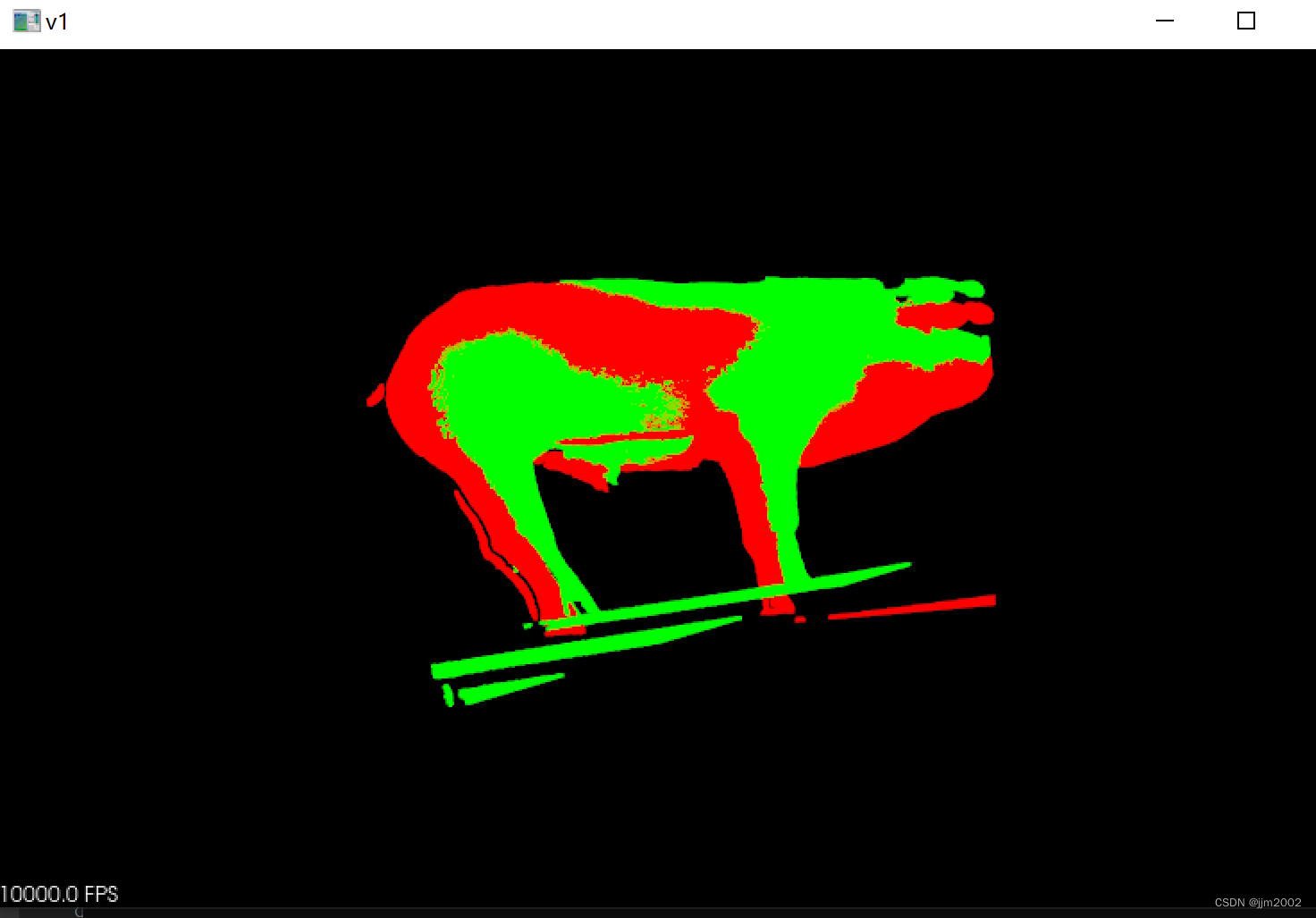
PCL点云处理之配准中的匹配对连线可视化显示 Correspondences(二百一十九)
PCL点云处理之配准中的匹配对连线可视化显示 Correspondences(二百一十九) 一、算法介绍二、算法实现1.可视化代码2.完整代码(特征匹配+可视化)最终效果一、算法介绍
关于点云配准中的匹配对,如果能够可视化将极大提高实验的准确性,还好PCL提供了这样的可视化工具,做法…

点云配准论文阅读笔记--Comparing ICP variants on real-world data sets
目录写在前面点云配准系列摘要1引言(Introduction)2 相关研究(Related work)3方法( Method)3.1输入数据的敏感性3.2评价指标3.3协议4 模块化的icp(Modular ICP)4.1 处理单元4.3使用5…
《点云处理算法》——GROR配准
GROR配准方法(实时性挺好) 一、 效果展示二、VS运行2.1 github源码下载2.2 编译运行 三、后续集成 一、 效果展示 二、VS运行
最近和小伙伴交流,他发现一个好用的配准方法,放在这里实现一下
2.1 github源码下载
gror
2.2 编译…
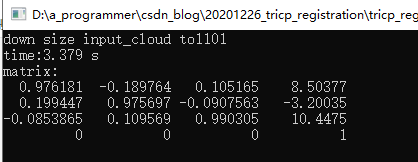
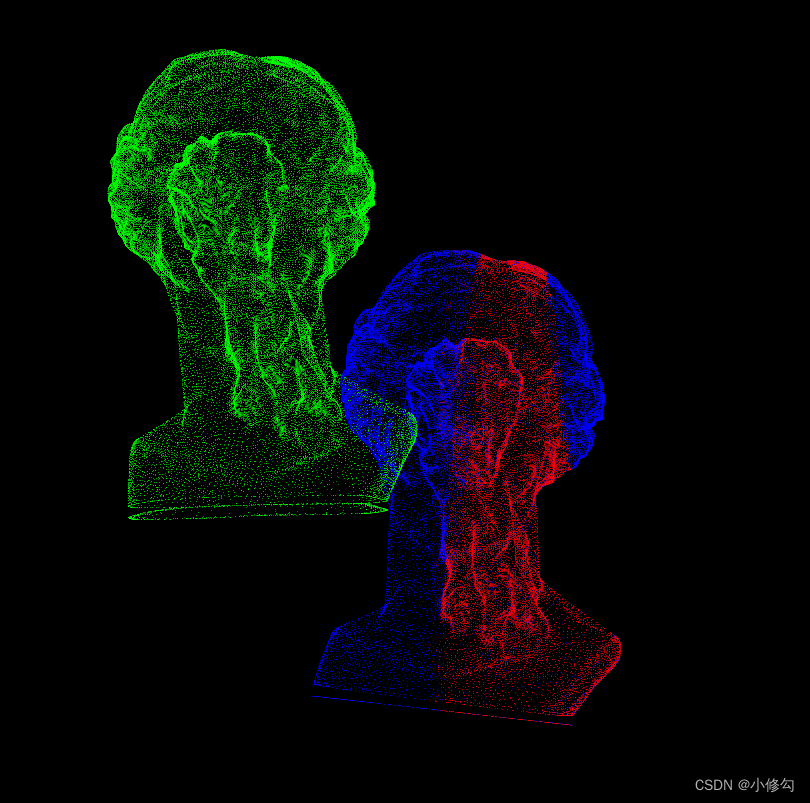
点云配准6:tricp算法在pcl上的实现
目录配准结果点云配准系列准备完整项目文件参数设定及说明数据参数代码结果Bunnyhippo算法小结参考及感谢完配准结果
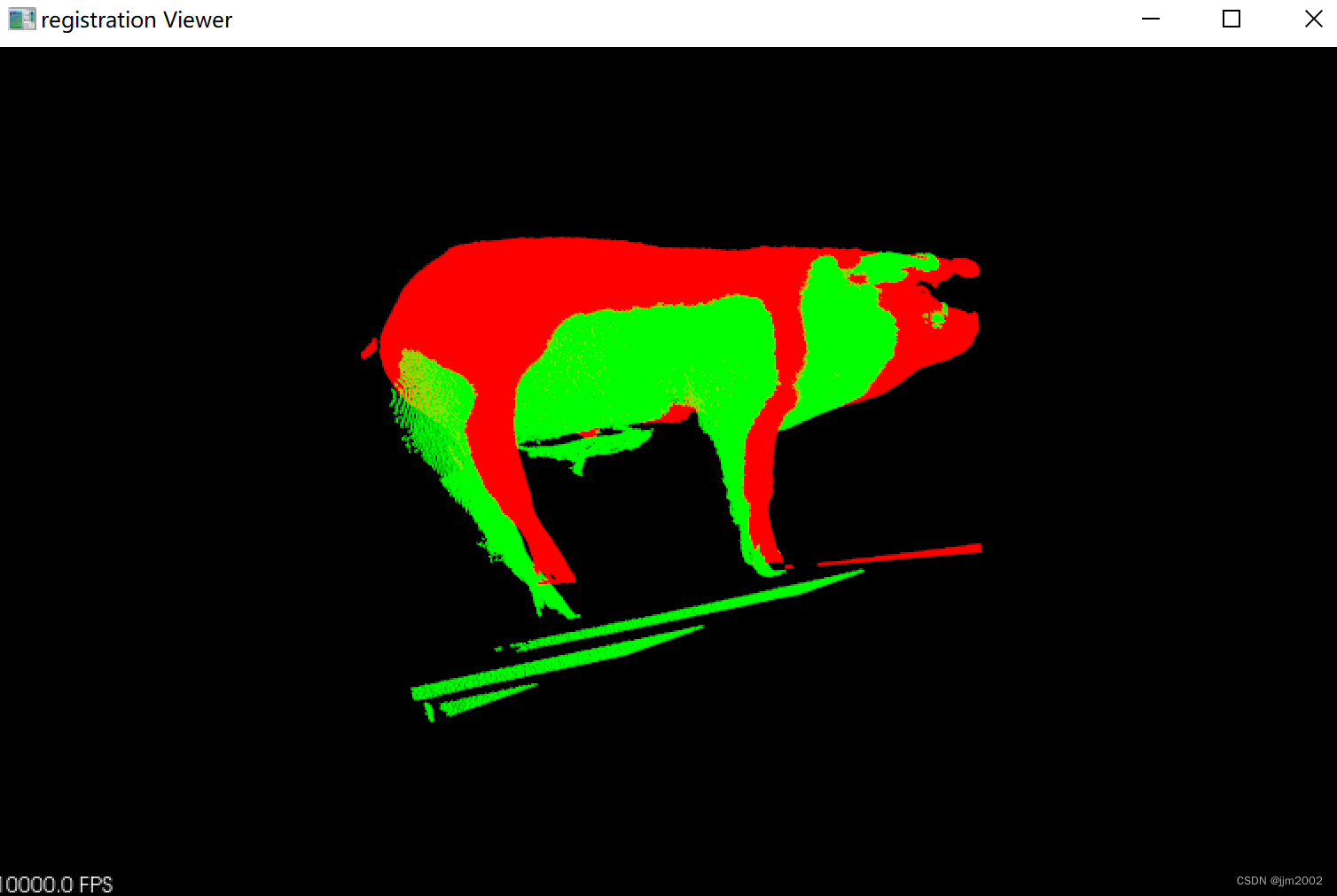
红色是目标点云(target),绿色是源点云(source),蓝色是配准后的源点云。 对Bunny成功实…

点云配准1:配准基础及icp算法
目录点云配准(point set registration)点云配准系列icp算法原理算法优缺点算法原理配准实现参考及感谢papersblogs完点云配准(point set registration)
对于一个目标,诸如激光雷达扫描仪(LIDAR)…

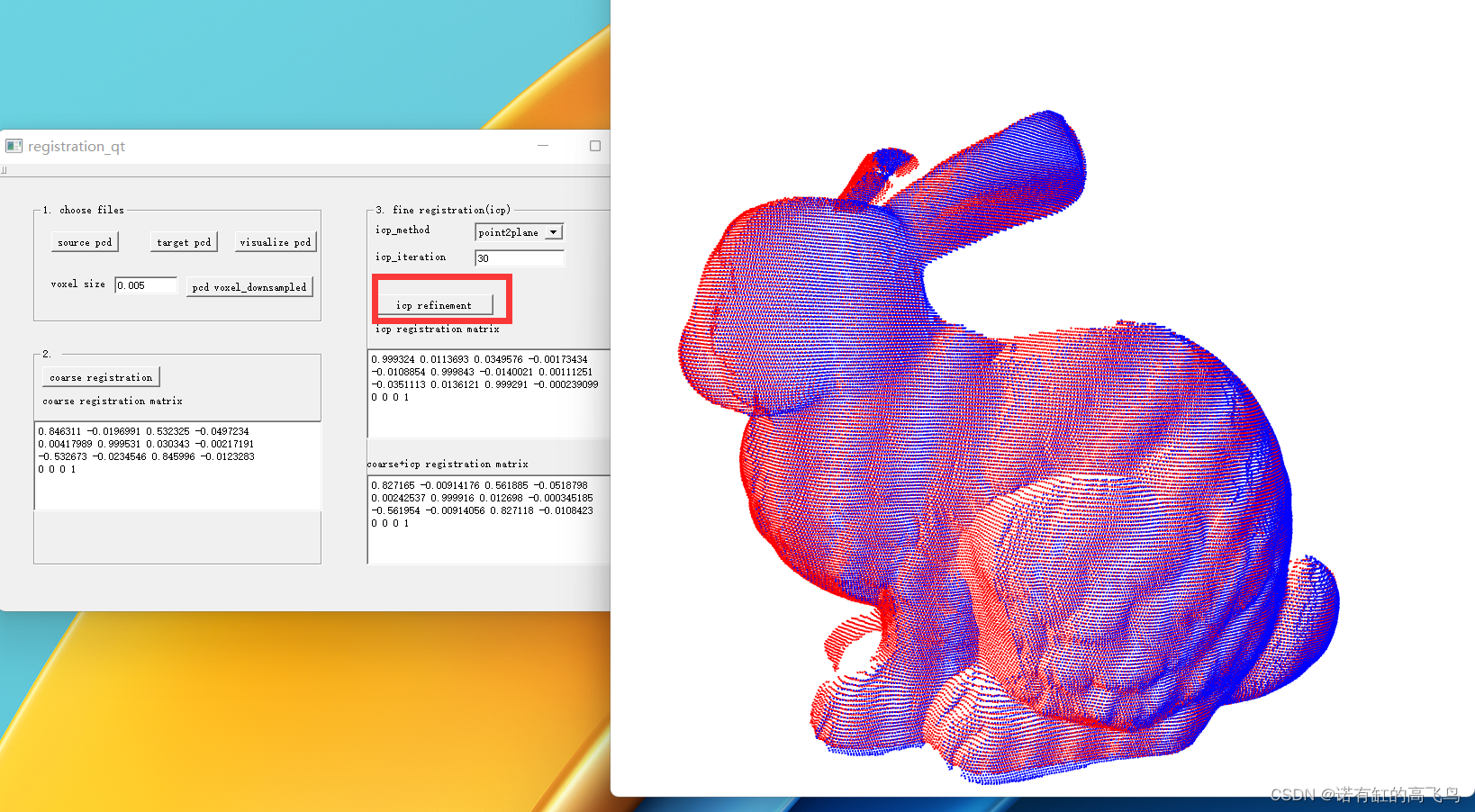
open3d使用fpfh做点云配准
目录写在前面准备编译open3d配准example编译demo配准测试参考完写在前面
1、环境:win10,cmake3.22.0-rc1,环境:win10,cmake3.22.0-rc1,已编译好的open3d 0.13 2、源码使用的是官方example https://github.…

点云配准论文阅读笔记--(4PCS)4-Points Congruent Sets for Robust Pairwise Surface Registration
目录点云配准系列写在前面Abstract摘要1 Introduction引言2 Background研究背景RANSACRandomized Alignment3 Approximate Congruent 4-Points近似共面四点3.1overview 概述3.2 Affine Invariants of 4-Points Sets四点集的仿射不变3.3 Extracting Congruent 4-points in 3D三维…

点云配准论文阅读笔记--3d-dnt博士论文
目录点云配准系列本文内容摘要chapter1 introduction1.1 Contributions1.2 outlinechapter2 常用概念2.1 点、位姿2.2 旋转2.3 配准2.4 采样chapter5 扫描配准领域的相关工作5.1 icp5.5 ndt算法chapter6 The normal-distributions transform6.1 用ndt表示曲面6.2 NDT scan regi…

点云配准论文阅读笔记--Efficient Variants of the ICP Algorithm
目录点云配准系列写在前面摘要1 1 Introduction – Taxonomy of ICP Variants引言-icp变体算法的分类2 Comparison Methodology比较方法2.1 Test Scenes用于测试的数据3 Comparisons of ICP Variants icp变体算法的对比3.1 Selection of Points选点(降采样ÿ…

【小贪】Python实现传统2D/3D配准——SIFT/SURF/ BRISK/ORB/AKAZE/ICP
导入使用到的包
import random
import math
import matplotlib.pyplot as plt
import numpy as np
import open3d as o3d
import cv2基于传统特征点匹配的2D配准函数。函数输入为想要配准的source图和target图,两个图像均为维度(h, w, 3)的ndarray。函数可以选择使…

open3d ICP 配准
文章目录 Three common registration techniquesPoint-to-point techniquePoint-to-plane registration ICP registrationHelper visualization functionInputGlobal registrationExtract geometric featureInputRANSAC Point-to-point ICPPoint-to-plane ICP References Three…
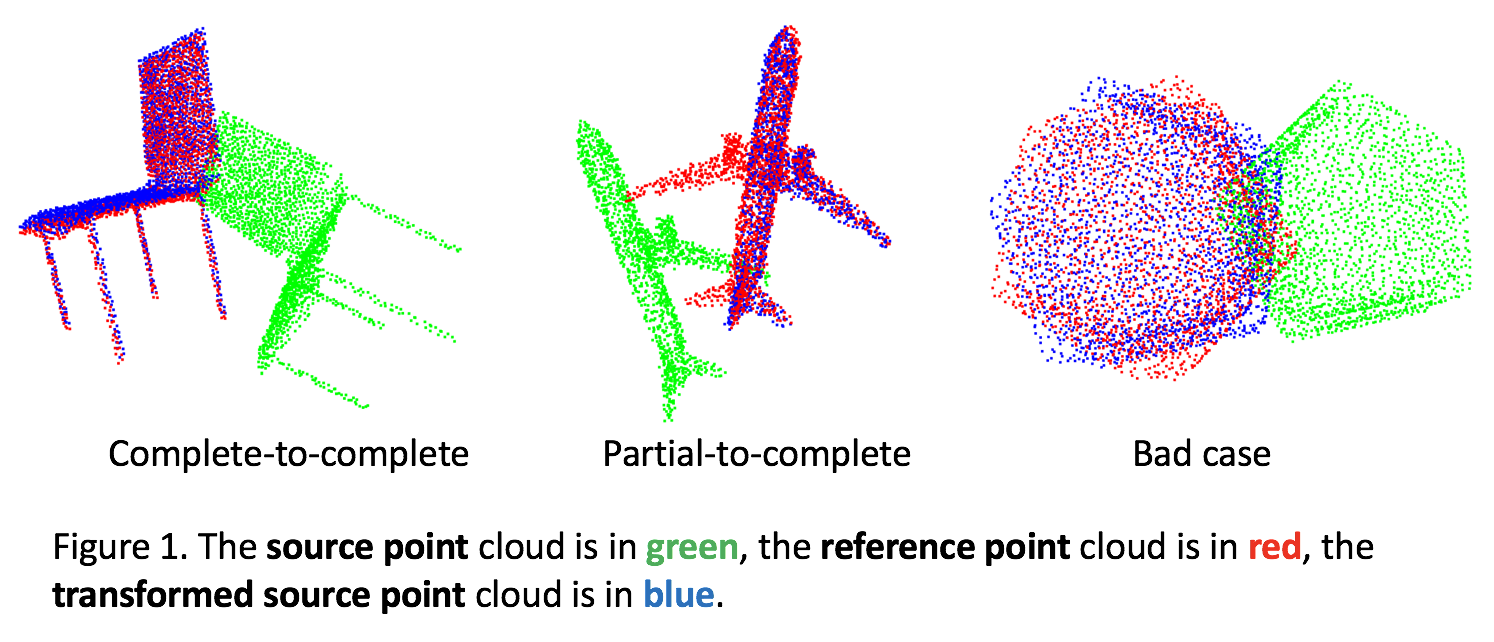
使用PCReg.PyTorch项目训练自己的数据集进行点云配准
项目地址: https://github.com/zhulf0804/PCReg.PyTorch/tree/main 网络简介: 网络是基于PointNet Concat FC的,它没有其它复杂的结构,易于复现。因其简洁性,这里暂且把其称作点云配准的Benchmark。因作者源码中复杂…
3DSC特征描述符、对应关系可视化以及ICP配准
一、3DSC特征描述符可视化
C
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/search/kdtree.h>
#include <pcl/io/pcd_io.h>
#include <pcl/features/normal_3d_omp.h>//使用OMP需要添加的头文件
#include <pcl…
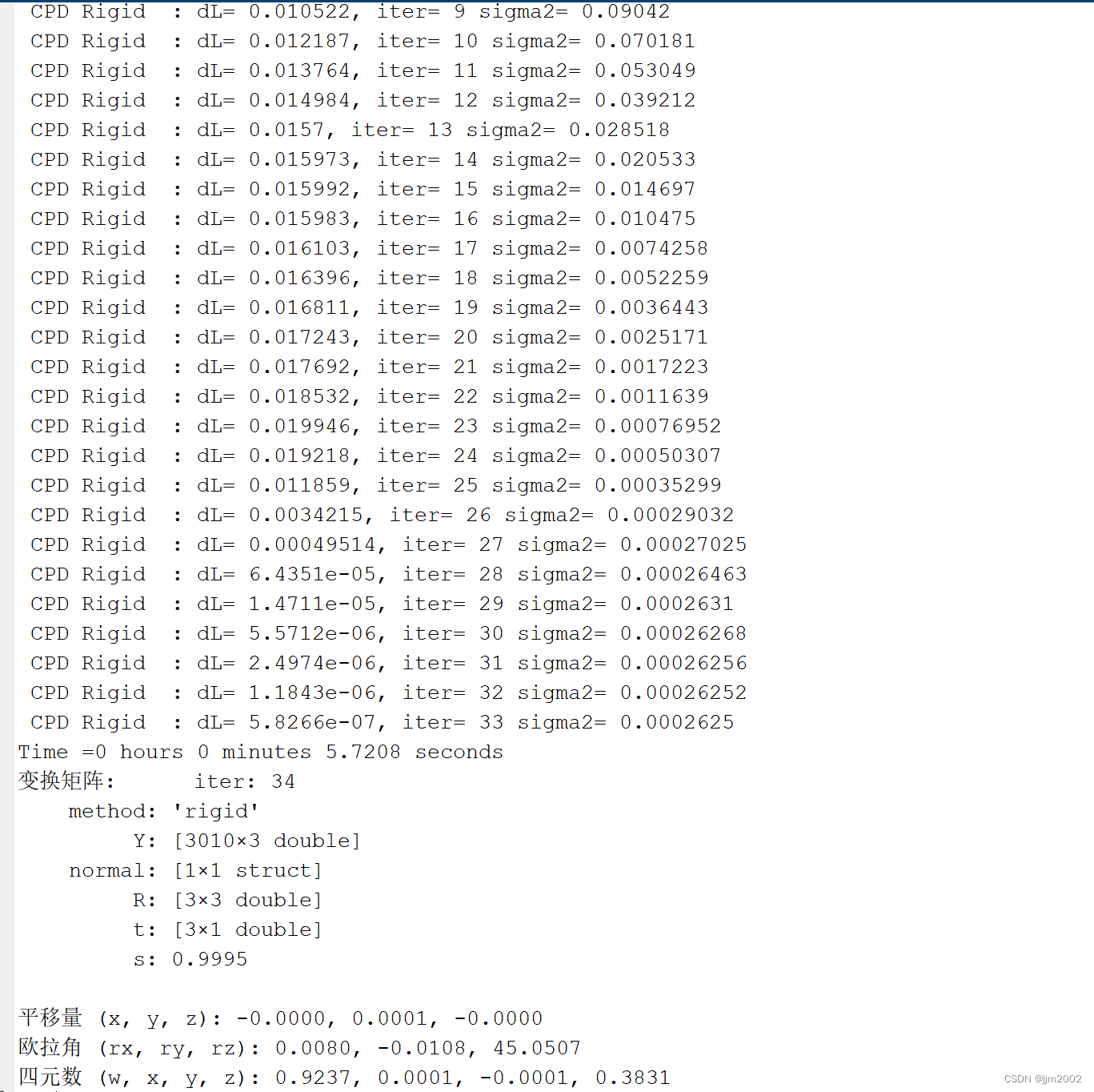
Matlab使用点云工具箱进行点云配准ICP\NDT\CPD
一、代码
主代码main.m,三种配准方法任选其一
% 读取点云文件
source_pc pcread(bun_zipper.ply);
target_pc pcread(bun_zipper2.ply);% 下采样
ptCloudA point_downsample(source_pc);
ptCloudB point_downsample(target_pc);% 配准参数设置
opt param_set…
点云配准介绍与示例代码
点云配准是什么?
点云配准是值将不同位置或视角获取的点云数据进行对齐的过程。当使用传感器(如激光雷达、摄像头等)从不同视角或位置获取多个点云时,这些点云可能存在不同的坐标系和姿态,使得它们直接叠加或进行比较…
Windows10安装PCL1.14.0及点云配准
一、下载visual studio2022
下载网址:Visual Studio: 面向软件开发人员和 Teams 的 IDE 和代码编辑器 (microsoft.com) 安装的时候选择"使用C的桌面开发“,同时可以修改文件路径,可以放在D盘。修改文件路径的时候,共享组件、…

点云配准(一)— ICP方法
点云配准本质上是将点云从一个坐标系变换到另一个坐标系。 点云配准通常会需要用到两个点云数据。第一类点云数据称为原始点云,用S(source)来表示。第二类点云数据称为目标点云,用T(Target)来表示。 点云配…

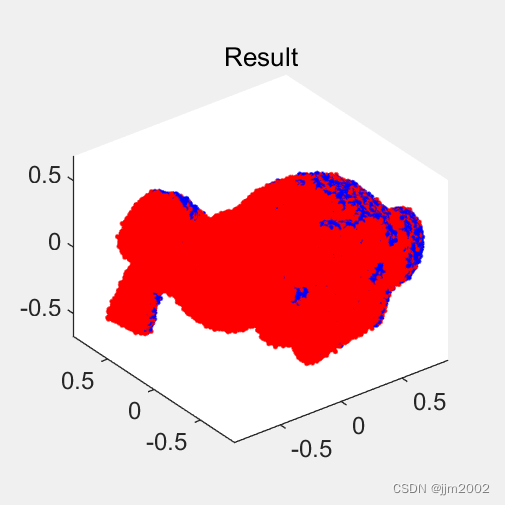
点云配准5:4pcs算法在pcl上的实现
目录配准结果点云配准系列准备完整项目文件参数设定及说明数据参数代码结果Bunnyhippo算法缺点参考及感谢完配准结果
偶尔效果比较好,白色是目标点云0的Bunny,紫红色是配准后的45Bunny点云
点云配准系列
点云配准1:配准基础及icp算法 点云…
SIFT 3D关键点检测以及SAC-IA粗配准
一、SIFT 3D关键点检测
C
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/common/io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <boost/thread/thread.hpp>
#include &…
点云配准(二)— python open3d ICP方法
上一节中介绍了点云配准的基础知识。本节将采用python open3d来进行点云配准。 open3d安装和点云配准介绍,请参考:
Open3d读写ply点云文件_Coding的叶子的博客-CSDN博客1 Open3d 安装Open3d是由Intel发布的一个开源库,支持快速开发和处理3D数…

python点云拼接
点云拼接主要是把不同的点云拼接到一起。通常,为了获得一个完整物体的三维点云,我们可能会在不同的视点进行数据采集,然后把采集的点云数据拼接到一起。 由于视点的不同,所采集到的多个点云的坐标系也会不一致。 为了解决坐标系不…

点云配准4:cloudcompare的使用以及点云配准功能
目录点云配准系列本文内容cloudcompare介绍下载点云配准系列cloudcompare点云配准打开点云配准配准结果变换矩阵的使用配准后点云融合并保存到一个文件参考完点云配准系列
点云配准1:配准基础及icp算法 点云配准2:icp算法在PCL1.10.0上的实现源码解析 点…
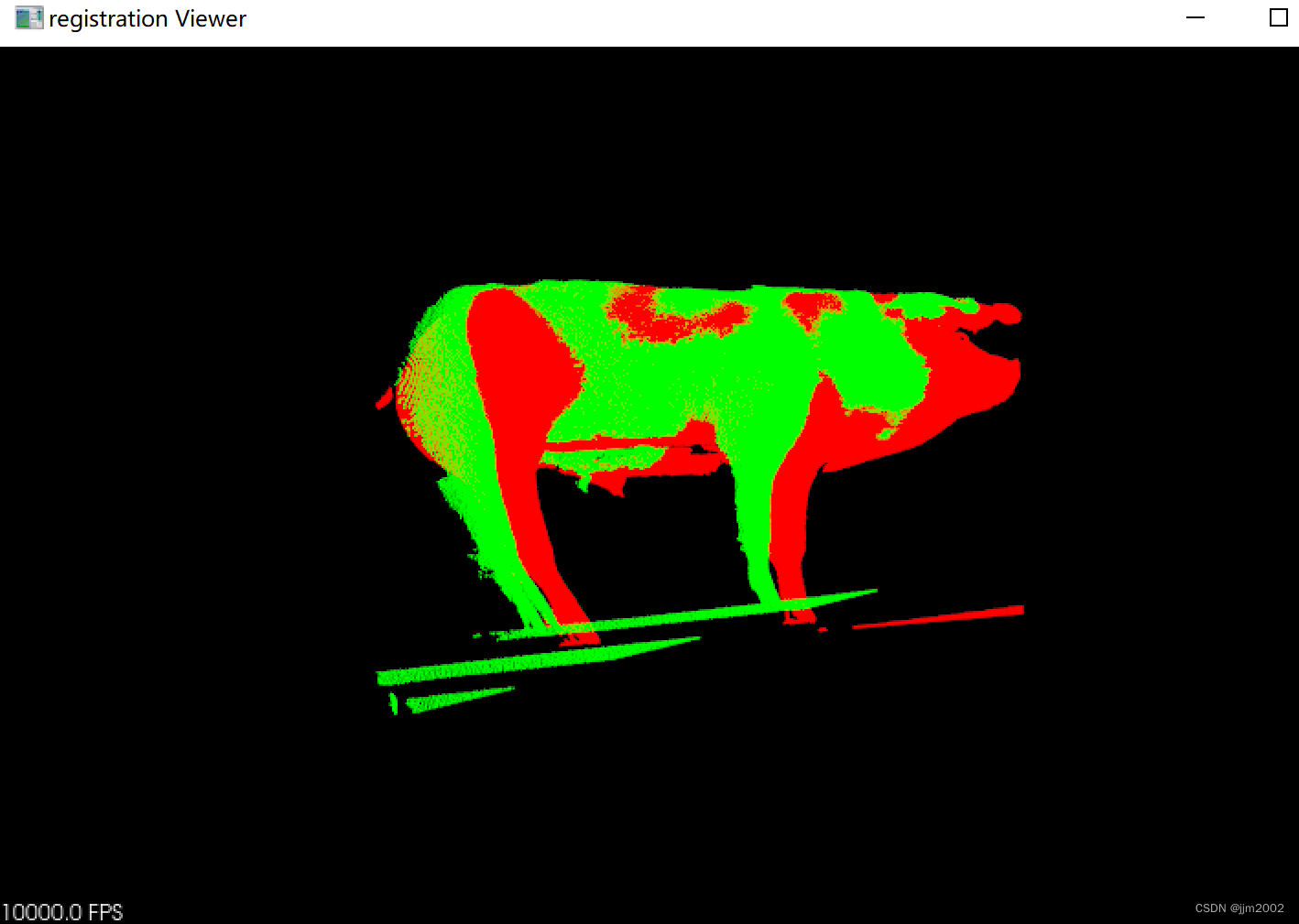
PCL点云处理之基于FPFH特征的全局配准流程具体实现(二百二十一)
PCL点云处理之基于FPFH特征的全局配准流程具体实现(二百二十一) 一、算法介绍二、算法实现1.代码2.效果一、算法介绍
PCL点云库提供的多种工具,可以组合为一套完整的点云配准流程,这里选择FPFH特征,进行具体的配准流程实现,主要内容包括点云读取、点云法线计算、点云特征…
GO-ICP的使用(一)
一、代码下载以、修改以及使用
下载:
链接:yangjiaolong/Go-ICP: Implementation of the Go-ICP algorithm for globally optimal 3D pointset registration (github.com)
解压之后 : 首先visual studio项目,配置好PCL环境&…
PFH特征描述符、对应关系可视化以及ICP配准
一、PFH特征描述符可视化
C
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/search/kdtree.h>
#include <pcl/io/pcd_io.h>
#include <pcl/features/normal_3d_omp.h>//使用OMP需要添加的头文件
#include <boos…

论文阅读:“基于特征检测与深度特征描述的点云粗对齐算法”
文章目录 摘要简介相关工作粗对齐传统的粗对齐算法基于深度学习的粗对齐算法 特征检测及描述符构建 本文算法ISS 特征检测RANSAC 算法3DMatch 算法 实验结果参考文献 摘要
点云对齐是点云数据处理的重要步骤之一,粗对齐则是其中的难点。近年来,基于深度…
【CloudCompare教程】017:点云快速全局配准
点云数据的配准分为基于特征(特征点、特征线)的拼接和无特征拼接。 特征点匹配的方法和全局ICP的方法。特征点的方法通过全局特征匹配达到全局配准,全局ICP的方法通过对变量空间进行搜索的方法达到全局最优解。 文章目录 一、点云配准概述1. 定义2. 分类二、加载点云数据三、…
使用PCL进行ICP点云配准
下面代码的功能是:把一个文件夹中所有的pcd文件进行ICP点云配准,并且把每帧结果使用PCL的cloud_viewer进行显示。因为是在ROS下使用,所以还有一个ROS的发布操作(可忽略)。 源码如下:
#include <iostream>
#include <…